Vieläkö jengi seuraa kirjoittelua täällä foorumilla, vai olisiko teksti parempi kirjailla johonkin Facebook-ryhmään tms.? Kaikki kommentit ovat tervetulleita!

EDIT: Vastauksista päätellen ei.

Siirrän turinani Facebookin puolelle.
Rakensin kuusi vuotta sitten AutoQuad-pohjaisen kuvauskopterin, kirjottelin siitä tänne foorumillekin aika paljon sillon muinoin. Kopteriharrastus hiipui, vaihtui kaluston rakentajan ja kameraoperaattorin taakeihin ja lopulta omat laitteet jäivät seinälle pölyttymään. Nyt kun tässä on sattuneista syistä ollut reilummin aikaa kotona, nappasin vanhan kopterin seinältä ja ajattelin laittaa sen takaisin ilmaan! Tarkoitus olisi elvyttää "taideilmakuvausharrastus", eli alkaa taas ottamaan luovia ilmakuvia esim. henkilöistä. Noh, siitä tuonnempana, jos saan kopterin suunnitelmien mukaan ilmaan.
Ostin monien suositusten perusteella kopteriin aivoksi tukensa ja yhteisönsä menettäneen AutoQuadin tilalle (laudat myytävänä sikahalvalla, jos joku tarvitsee

) Pixhawk 2.1 Cuben. Nopareina on tarkoitus pitää yhä vanhat ESC32:t ja runkoa en lähde sen ihmeemmin modaamaan. Muunsin logistisista syistä alunperin elämänsä heksana aloittaneen kopterin silloin joskus Y6:ksi, eli kolme vartta ja kunkin päässä kaksi moottoria. Potkureina oli silloin jotkut geneeriset 17" kolmiomaiset huiskat ja akkuina kaksi 4000mAh 4S-pakkaa rinnan kytkettyinä. Moottoreina Dualsky:n XM5010MR-9T 390kv.
Olin haalinut vuosia sitten kaappiin myös muutaman muun potkurin ja pari 5S-akkua, koska en ollut tyytyväinen kopterin lentoaikaan (oisko ollu 7 minuuttia). Tarkoitus oli jo silloin joskus dynottaa nuo kaikki eri kombot, mutta kiinnostus hiipui ennen kuin ryhdyin projektiin. Noh, nyt se olis siis heti edessä!
Ensin minun piti kalibroida ESC32 jokaiselle akku/potkuri-kombolle erikseen. Tuo nopari ajaa kalibrointiajon, jossa se määrittää tietyllä maksimivirralla nopeimman mahdollisen kierrosnopeuden muutoksen eri alueilla. Eli käytännössä vaikka puolikaasulta 55% nopeuteen, puolikaasulta 65% nopeuteen ja niin edelleen. Näin nopari saadaan toimimaan optimaalisesti nopeissa muutoksissa ilman tarvetta mitoittaa maksimivirtaa aivan tolkuttoman suureksi "varmuuden vuoksi". Tuo kalibrointiajo kestää noin neljä minuuttia, hieman riippuen akusta ja maksimivirrast jne. ja näyttää tältä. Lopun "liinat kiinni" on aina yhtä säpsähdyttävä yllätys!
Kun voimalinja oli kalibroitu kaikille mahdollisille komboille (3S, 4S ja 5S akut, kolme eri potkuria) ja asetukset saatu myöhempää käyttöä varten tiedostoiksi talteen, oli vuorossa varsinainen "dynotus", eli moottorin ottaman tehon ja siitä seuraavan nosteen suhteen mittaus. Päätin tehdä sen yksinkertaisimmalla mahdollisella tavalla: sähköiset datat suoraan Pixhawkin telemetrialta, nosteen suuruus vaa'asta, jonka päältä kopteri nykii moottorin alle ripustetulla narulla kahden kilon painoa. Tuo kaksi kiloa osoittautui hieman liian pieneksi massaksi suurimmalla potkurilla ja jännitteellä, mutta sitä suurempaa ei vaakani suostunut punnitsemaan, joten sillä mentiin.

Tässä potkurivalikoima:

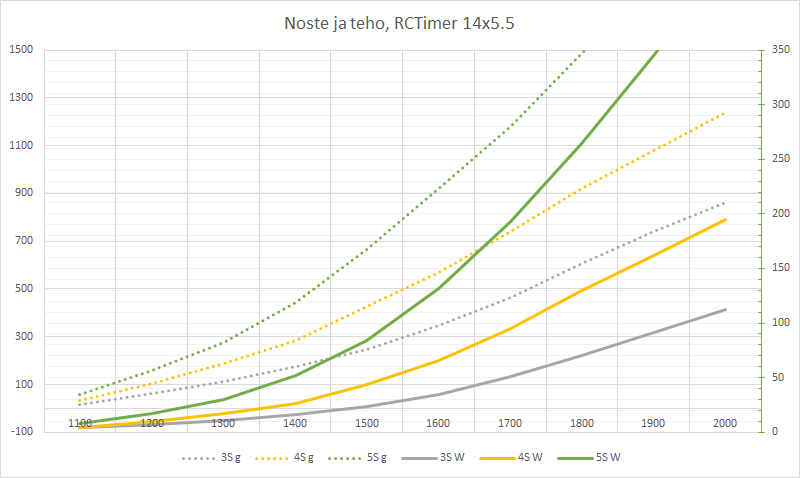
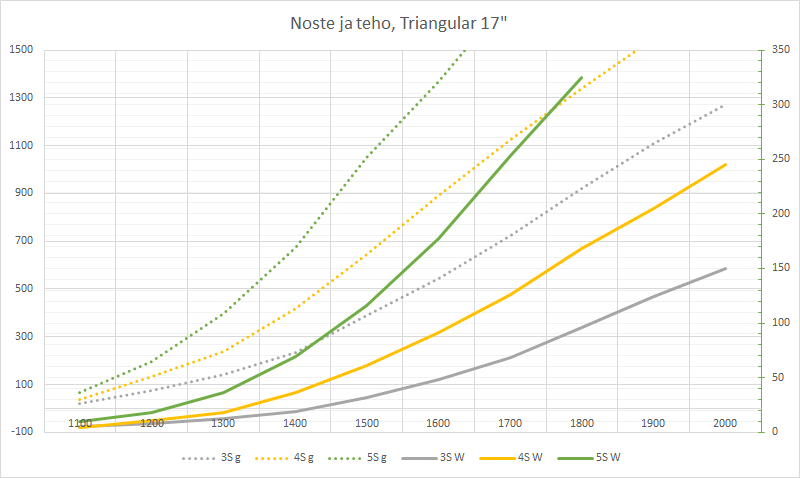
Ajoin manuaalisesti kaasua 100 askeleen pykälin, eli 1100, 1200, 1300 jne. välillä 1000-2000 ja löin askelia vastaavat teho- ja nostelukemat Exceliin. Ajatuksena oli, että korkeampi jännite ja suurempi potkuri toisivat paremman hyötysuhteen, mutta... Jos oikein mittauksia tulkitsin, paras hyötysuhde saadaan 3S-akulla ja suurimmalla potkurilla! Kuvaajat tekstin lopussa. Voin näyttää myös hyötysuhdekuvaajat, jos joku on niistä kiinnostunut, mutta pähkinänkuoressa paras hyötysuhde on melko vakiona samoilla kierroksilla kierroslukualueen alkupäässä, eli käytännössä sitä pienemmällä kaasulla, mitä korkeampi on akun jännite. Esimerkiksi 17" potkurilla paras hyötysuhde (noin 13g/W) löytyi 4S akulla, noin 25% kaasulla, noin 230 gramman nosteella.
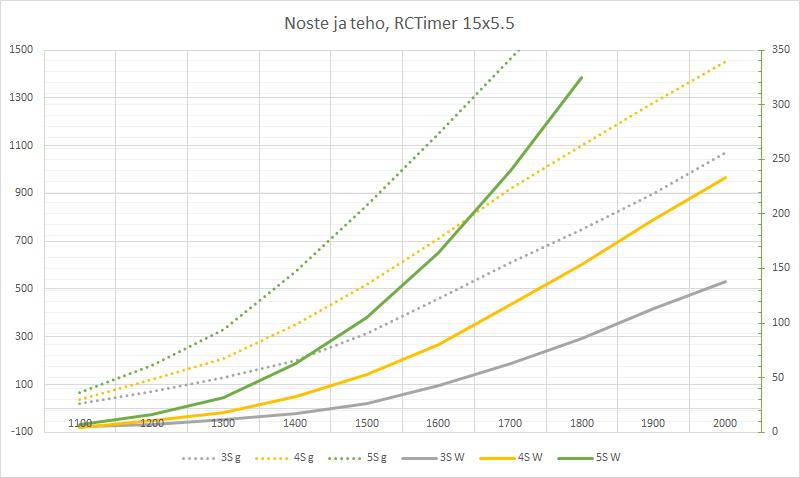
Koska kopterini painaa kameroineen akkuineen kaikkineen noin neljä kiloa, laskin että yhdelle mottorille tulee leijunnassa noin vajaan 700g kuorma. Interpoloin kuvaajista jokaiselle potkurille ja jännitteelle (akulle) sen tehon, joka vaaditaan 700g nosteen aikaansaamiseen. Voittavat jännitteet per potkuri olivat:
RCTimer 14x5.5: 3S akku, noin 85W, noin 85% kaasulla
RCTimer 15x5.5: 4S akku, noin 75W (60%)
Tri 17": Tasapeli, 3S 65W (67%) ja 67W (50%)
Näistä tuloksista näen ilokseni, että vuosia sitten täysin summamutikassa valitsemani voimalinja (4S, 17") osoittautui kaikkein piheimmäksi! Jos hiukan vielä haluaisin viilata, voisin vaihtaa 3S-akkuihin. Niillä suurin mahdollinen noste 100% kaasulla on noin 1300g per moottori, eli hyvin riittävä turvakerroin (1,9) kopterin massaan nähden. Toisaalta 4S-akuilla kopteri leijuu nätisti 50% kaasulla, mutta kuvauskäytössä tällä ei ole niin väliä - siis toisin sanoen en kaipaa 50% "turvamarginaalia"/säätövaraa kaasussa, koska kopterilla ei ole tarkoitus tehdä äkkinäisiä liikkeitä. Noh, 4S:llä riittää hieman pienempi virranantokyky, joten se on sikälikin hyvä valinta.
Jatkan siis todennäköisesti noilla 4S-akuilla, kun niitä vielä tuolla laatikossa on... jos eivät sitten ole vuosien saatossa antautuneet täysin, kuten vaikkaan käyneen.



 Aihe: Kuvauskopteri takaisin ilmaan (Luettu 3431 kertaa)
Aihe: Kuvauskopteri takaisin ilmaan (Luettu 3431 kertaa)


